
Fairbanks Parking Lot UAV Mapping
Saturday, May 22nd 2014
** Quadcopter Fun **
Unmanned Aerial Vehicle (UAV) mapping has been a work topic for the last few years. Especially with the growth of ACUASI at UAF and the recently launch of the EPSCoR Modern Blanket Toss project - training highschool students how to fly UAVs and collect data.
I’ve recently let a few of my spare cycles be absorbed by a fascination with UAVs and flying them. The Modern Blanket Toss/Upward Bound folks let me borrow one of their training copters for the students.
Hubsan X4
with a 2MP pin hole camera - $70:

I of course had to Amazon up a crash pack to replace the parts I’ve broken while borrowing the copter while learning to fly … which is the whole point. Learn how to fly a quad copter that costs $60 instead of $1600 is much safer and a pile of fun.
I so enjoyed borrowing the X4 that I’ve ordered up two of my own (without the cameras).
Trail maps
Then last week GINA was contacted for a shapefile of the UAF campus trails. In the process of digging around the community to find the data the email thread expanded out to loop in some of the Fairbanks Drone User Group (DUG). The group felt that if we couldn’t find the trails as shapefiles we could go map the trails using a UAV. We decided to meet up at the IARC/WRRB parking lot and play with a UAV.
This saturday afternoon we gathered together to give a shot at doing some UAV flying. The wind turned out to be a bit too much to allow unleashing the UAV for real mapping efforts so we launched and flew the IARC-WRRB parking lot.
Logan Graves of the DUG brought his 3DRobotics quad with his GoPro as seen below with the specs he provided.

- 3DRobotics quad running on an APM 2.5 with GoPro Hero 2
- x 850KV motors with 10”x4.7” props
- running on 15A Turnigy Speed Controllers
- 1.3 GHz video TX for FPV view, a 915 MHz Xbee for telemetry, and a 2.4GHz Radio Controller
- 4000 mAh battery for a flight time of around 12 minutes
Logan preparing launch:

Shot once it was launched:

Processing
Logan, the UAV owner and pilot, was nice enough to provide me a copy of the imagery collected. I tossed the imagery into a demo copy of Agisoft Photoscan to see if I could create a point cloud and mesh out of the imagery.
I managed to get a point cloud generated from the frames. Took 5 hours.
This is the first time I’ve used Agisoft … and I’ve not read any of the tutorials/documentation or asked anybody who actually knows how to use this software… and clearly I should probably do that.
That said I did get a point cloud and a made a mesh and my initial results were not very impressive:
I poked around a bit and realized the input imagery from the GoPro clearly was affected by shaking and the wind as you can see below:

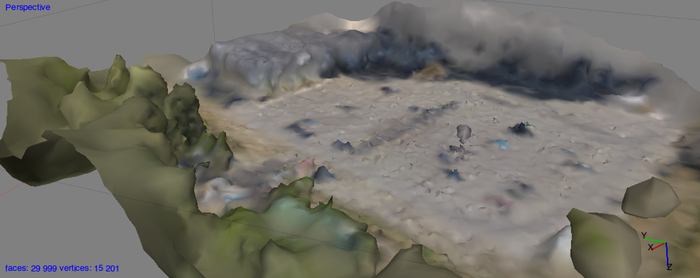
Not wanting to give up, I told AgiSoft to try harder and spend 8 hours matching pixels (higher quality target resolution). This second attempt managed to upgrade the point cloud and mesh to look like the WRRB/IARC parking lot:

Not great but loads of fun and education.
University of Alaska Fairbanks Trails
Don’t worry - In the end a combination of the Fairbank’s
Borough and the UAF Facility Services came though with
vectors of the UAF trails for the requesting user.
I’ve made those available on GitHub at the following
repos: